The first version of the RTTY transmission code I wrote for AVR processors relies on timers to control the frequency shifts timing. That worked well, but because the data rate is extremely low (300 bits per seconds at most), it means the firmware is going to spend most of its time blocked by the RTTY code, waiting to send the next bit.
The solution, it turns out, is to drive the RTTY frequency shifts through timers and interrupts. The idea is pretty simple: once a timer is started, it triggers an interrupt. An Interrupt Service Routine (ISR) then takes care of checking if anything is available in the transmit buffer, and transmit it if there is.
Because RTTY frames each 8-bit word with one start bit and two stop bits, transmitting a bit every time the interrupt fires is not possible. Instead, I wrote the ISR as a simple state machine:
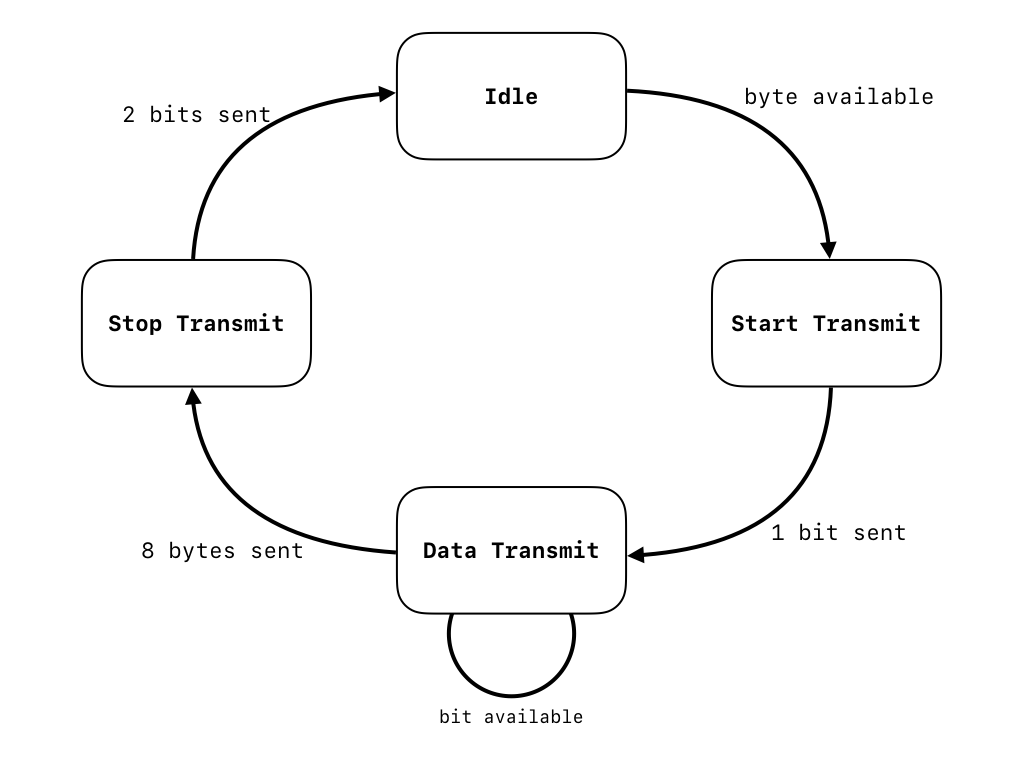
The state machine is controlled by two variables: _rtx_counter is used to count how many bits have been sent in the current state, and _rtx_state is the actual state (a simple enum).
The transmit function is as simple as it can get: if the RTTY buffer is not full, it adds the byte to it, and the ISR will consume it when possible. If the transmit buffer is full, the write function will block until a slot is available, to avoid dropping data if the volume is too high.
:::c
#include <habcore/rtx.h>
#include <habcore/utils.h>
#include <avr/interrupt.h>
#define RTX_BUFFER_SIZE 256
#define RTX_PIN 0
typedef enum rtx_state_e {
STATUS_IDLE,
STATUS_START,
STATUS_DATABIT,
STATUS_STOP,
} rtx_state_t;
static volatile uint8_t _rtx_tx[RTX_BUFFER_SIZE];
static volatile index_t _rtx_head;
static volatile index_t _rtx_tail;
static volatile byte_t _rtx_byte;
static volatile uint8_t _rtx_counter;
static volatile rtx_state_t _rtx_state;
ISR(TIMER1_COMPA_vect) {
switch(_rtx_state) {
case STATUS_IDLE:
// We've finished transmitting the previous byte.
if(_rtx_head == _rtx_tail) {
break;
}
// fetch the next byte to sen.
_rtx_byte = _rtx_tx[_rtx_tail];
_rtx_tail = (_rtx_tail + 1) % RTX_BUFFER_SIZE;
_rtx_counter = 0;
// Fall through to send the stop bit.
case STATUS_START:
// Send the start bit.
cbi(PORTB, RTX_PIN);
_rtx_state = STATUS_DATABIT;
break;
case STATUS_DATABIT:
// Send the next databit if not all 8 have been sent yet.
if((_rtx_byte >> _rtx_counter) & 0x01)
sbi(PORTB, RTX_PIN);
else
cbi(PORTB, RTX_PIN);
// Done with the byte, send the stop bits.
if(++_rtx_counter >= 8) {
_rtx_state = STATUS_STOP;
_rtx_counter = 0;
}
break;
case STATUS_STOP:
// Send a stop bit if two haven't been sent yet
sbi(PORTB, RTX_PIN);
if(++_rtx_counter >= 2) {
_rtx_state = STATUS_IDLE;
}
break;
}
}
void rtx_start(uint16_t bps) {
_rtx_head = _rtx_tail = 0;
sbi(DDRB, RTX_PIN);
sbi(PORTB, RTX_PIN);
cli();
// disable interrupts while we setup the timer
TCCR1A = 0;
TCCR1B = 0;
OCR1A = F_CPU / 1024 / bps - 1;
sbi(TCCR1B, WGM12);
sbi(TCCR1B, CS10);
sbi(TCCR1B, CS12);
sbi(TIMSK1, OCIE1A);
// enable interrupts.
sei();
}
void rtx_stop() {
}
bool rtx_ready() {
return (RTX_BUFFER_SIZE + _rtx_head - _rtx_tail) % RTX_BUFFER_SIZE;
}
int8_t rtx_write(byte_t data) {
index_t next_head = (_rtx_head + 1) % RTX_BUFFER_SIZE;
// block until we can put the data byte on the buffer.
while(next_head == _rtx_tail){}
_rtx_tx[_rtx_head] = data;
_rtx_head = next_head;
return 1;
}
index_t rtx_write_bytes(const byte_t* data, index_t length) {
index_t w;
for(w = 0; w < length; ++w) {
if(rtx_write(*(data++)) != 1) {
break;
}
}
return w;
}
Using these few functions, I can transmit text and SSDV images over RTTY without completely blocking the main loop. Success!